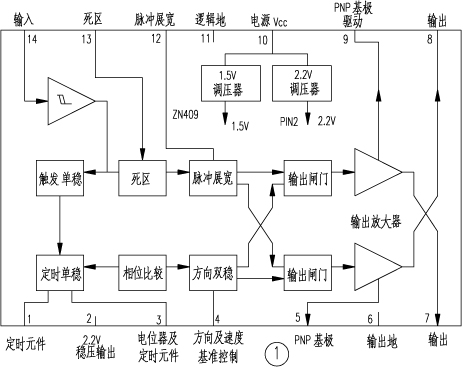
本控制器使用Ferranti公司生产的ZN419CE伺服机构控制器IC来控制模型火车的行车方向和行驶速度,图1是该IC的内部电路框图。输入的正向控制脉冲可直接或通过电容耦合到{14}脚输入端。采用直接耦合的缺点是:一旦前级电路出现故障而使输入信号变成持续的直流电平时,伺服机构的输出臂将不停地旋转而出现误动作。如果采用电容耦合,则直流输入电压即被隔断,伺服机构的输出臂将停留在其最后的静态位置。因此,最好是采用电容耦合。
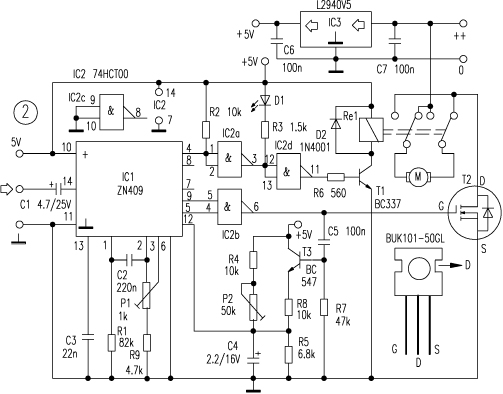
本控制器的电路见图2。为了使ZN419CE的触发与输入脉冲前沿的上升速度无关,{14}脚输入的脉冲首先经斯密特触发器整形后,再去触发IC内部的单稳多谐振荡器。该振荡器产生的脉冲宽度可用外接在1~3脚的电位器P1来微调。该脉冲与输入脉冲由IC内部的脉冲比较器进行比较,得到的脉冲用来控制IC内部的两个输出放大器使之保持正确的相位。此外,模型火车在改变行驶方向时(如由前进变为倒退时),驱动电机必须有一段时间停止不动,即伺服机构应有一个“死区”,此功能由IC1内部的死区电路来实现,其外接电容C3接在{13}脚与地之间。
IC1利用输入脉冲与单稳脉冲的宽度差来控制电机的转速,其控制方向是使二者之差减小,所以控制的结果是,伺服机构输出臂的位置与本控制器中电位器的转轴位置趋于一致。控制器操纵杆的位置与输出信号占空比(该占空比决定模型火车的速度,其值为0~100%)之间的关系取决于{12}脚的电位,并可由电位器P2调定,操纵杆和电机的其余位置则由P1调定。
IC1的5、9脚输出的电压加到与非门IC2b的输入端。IC2b输出的脉宽调制(PWM)信号通过功率MOS场效应管T2控制电机M的转速。该PWM信号还通过C5和T3驱动IC1内部的脉冲展宽电路,因此只有死区之外的脉冲才能被展宽,从而使电机的切换和控制得到改善。决定行驶方向的4脚电位经非门IC2a、IC2d和T1缓冲后控制继电器Re1的通断,从而控制电机的转动和模型火车行驶的方向,发光二极管D1起方向指示灯的作用。由于Re1的工作电流较大(12~16A),应使模型火车在Re1释放时向前行驶,以减小Re1吸合时间并节省电源消耗。
伺服机构由IC3(L2940V5)提供稳定的5V电源电压。如果本控制器的电源电压大于8V,则IC3可用标准的7805稳压器IC。电机M的电源电压则无需稳压。大功率场效应管T2应能承受25A电流,如果需要更大电流,则可将两只功率场效应管并联起来使用。价格较便宜的BUK100每只可以承受13A负载电流。如果使用印制电路板,则通过大电流的铜箔线条应具有足够的宽度并用焊锡和导线予以加厚。在电机两端应跨接一只0.01~0.1μF的电容,并在其外壳与地之间加接一只001μF/50V的瓷介电容以抑制噪声干扰。
江明 编译

